top of page

based on ROS and using Nvidia jetson TX2, Real Sense 3D depth camera, razor 9 DOF IMU and Roomba platform along with Arduino with Logitech game rumble controller.

LIDAR Clustering DBScan- VLP16
Sensor Fusion: Encoders and IMU
Sensor Fusion: Encoders and IMU
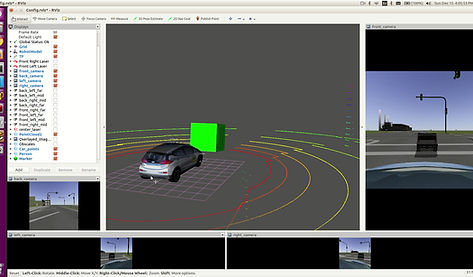
Gazebo Environment for autonomous vehicleS testing and radar visualization
Lateral controller using Behavioural cloning Convolution neural network
Sensor Fusion Lidar and Camera



Canoe and carmaker FMU interface

bottom of page